Symbolic Calculator
For iPhone, iPod Touch and iPad
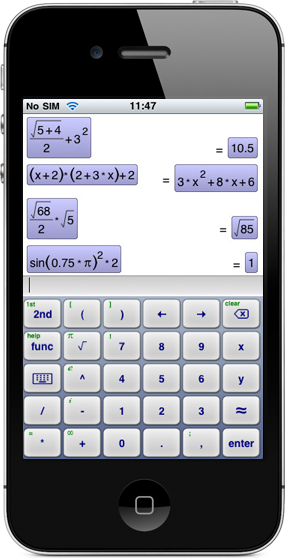
The perfect math app with full-featured algebra capabilites on par with high-end scientific calculators, ideal for high-school or college students, engineers or anyone needing a powerful math toolbox. Even if you are using just a fraction of the functionalities, the iphone-ish, easy-to-use interface makes life much easier compared to traditional calculators.
- Exact arithmetic (unless you select rounded numerical mode)
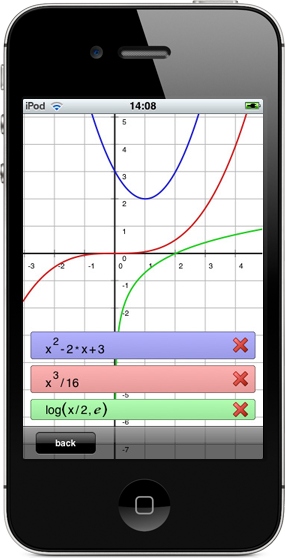
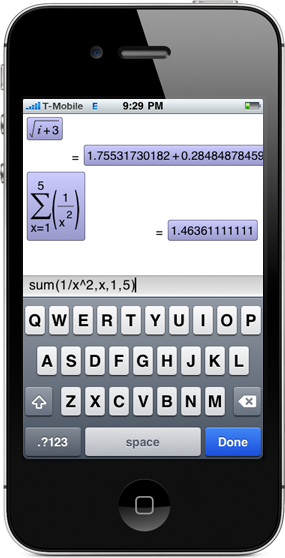
- Formulas displayed in "natural" form
- History, storing results in an easy-to-use way
- Unlimited number of variables, user-defined functions
- Session management
- Simplifying or expanding expressions
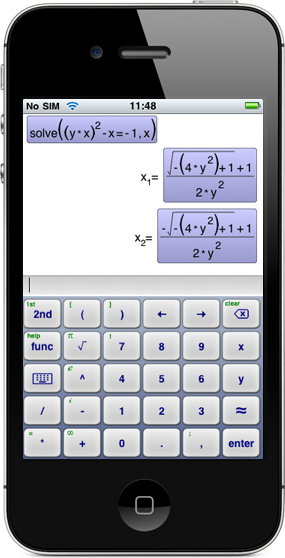
- Solving equations, systems, differential equations, numerically or symbolically
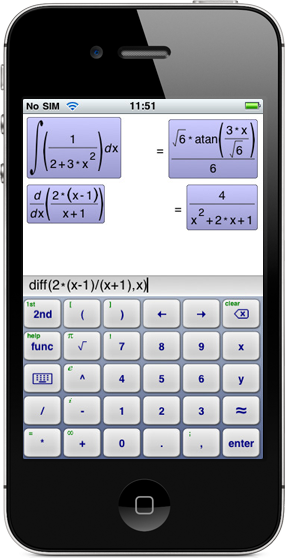
- Integrals, derivatives, limits, taylor series, etc for function analysis
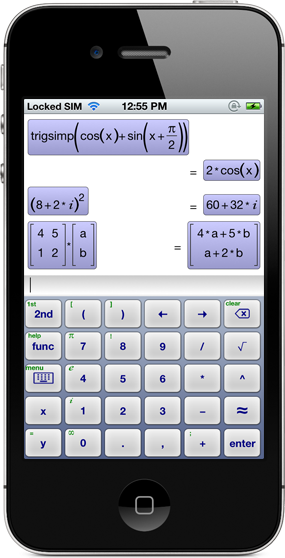
- Full support for complex numbers
- Vectors, matrices, linear algebra functions

Note that this video was made with an earlier version of the app
so there are some differences, but it still illustrates
the basic concepts of the user interface.
If you would like to read the in-app help on an other device while running the app, you can access the help files from here:
iPhone version
iPad version
Additionally here is a list of built-in functions. Click on one of them to see the details. (this is the same as what you get when pressing the question mark in the function list)
abs(expr)
Examples:
abs(-6)=6
abs(3+4*i)=5
asin(expr)
asinh(expr)
acos(expr)
acosh(expr)
atan(expr)
atanh(expr)
acot(expr)
acoth(expr)
binomial(n,k)
Examples:
binomial(9,4)
ceiling(expr)
Examples:
ceiling(4.3)
char(m)
Examples:
char([2,1;3,5]) = x^2-7*x+7
char([2,1;3,8],y) = y^2-10*y+13
clear(symbol)
Examples:
clear(x)
coldim(m)
Examples:
coldim([1,2,3;2,3,4]) = 3
conj(expr)
Examples:
conj(3+2*i) = 3-2*i
cos(expr)
cosh(expr)
cot(expr)
coth(expr)
csc(expr)
det(m)
Examples:
det([2,1;3,5]) = 7
diff(expr,symbol[,n])
Examples:
diff(x^2+x-1,x) = 2*x+1
diff(cos(x)*x*y,x) = y*(cos(x)-sin(x)*x)
diff(x^2+x,x,2) = 2
dim(v)
For matrices use the coldim and rowdim functions.
Examples:
dim([1,2,3]) = 3
div(expr,expr)
Examples:
div(9,4)
div(x^3+x^2-2x+1,x-1)
factor(expr)
Examples:
factor(x^2+x-2) = (x+2)*(x-1)
factorial(n)
Examples:
factorial(5) = 120
floor(expr)
gcd(expr,expr)
Examples:
gcd(6,4)=2
gcd(x^2+2*x+1,x^2+3*x+2)=x+1
ifactor(n)
Examples:
ifactor(24)=2^3*3
inv(m)
Examples:
inv([2,1;5,3]) = [3,-1;-5,2]
invlap(expr,symbol,symbol)
- 1. The expression to be transformed.
- 2. Source variable (usually 's' in freq. domain)
- 3. Target variable (usually 't' in time domain)
Examples:
invlap(w/(w**2+s**2),s,t) = sin(w*t)
im(expr)
Examples:
im(3+2*i) = 2
integrate(expr,symbol,expr,expr)
- 1. Integrand function
- 2. Variable of integration
- 3. lower bound of domain
- 4. upper bound of domain
The 3rd and 4th arguments can be omitted. In this case you get the indefinite integral.
Examples:
integrate(x^2,x) = x^3/3
integrate(sin(x),x,0,pi) = 2
laplace(expr,symbol,symbol)
- 1. The expression to be transformed.
- 2. Source variable (usually 't' in time domain)
- 3. Target variable (usually 's' in freq. domain)
Examples:
laplace(sin(w*t),t,s) = w / (w^2 + s^2)
lcm(expr,expr)
Examples:
lcm(12,15) = 60
lcm(2*x+1,3*x+2) = 6*x^2+7*x+2
limit(expr,symbol,expr)
- 1. Function.
- 2. Variable of the function.
- 3. The point of limit.
Examples:
limit(sin(x)/x,x,0) = 1
limit2(expr,symbol,expr)
- 1. Function.
- 2. Variable of the function.
- 3. The point of limit.
Examples:
limit2(sin(x)/x,x,0) = 1
limit2(1/x,x,0) = undefined
limitl(expr,symbol,expr)
- 1. Function.
- 2. Variable of the function.
- 3. The point of limit.
Examples:
limitl(1/x,x,0) = -infinity
limitr(expr,symbol,expr)
- 1. Function.
- 2. Variable of the function.
- 3. The point of limit.
Examples:
limitr(1/x,x,0) = infinity
ln(expr)
log(expr,expr)
Examples:
log(100,10) = 2
log10(expr)
mateigen(m,symbol)
Examples:
mateigen([1,2;2,1],x)
matmake(expr,rsymbol,rn,csymbol,cn)
- 1. Expression to define the elements
- 2. Symbol to be substituted with the row number
- 3. Number of rows of the matrix
- 4. Symbol to be substituted with the column number
- 5. Number of columns of the matrix
Examples:
matmake(100a+b,a,3,b,4)
min(n,...)
Examples:
min(10,-2,5)
min([2,6,1;2,4,5])
max(n,...)
Examples:
max(10,-2,5)
max([2,6,1;2,4,5])
nextprime(n)
numint(expr,symbol,expr,expr)
- 1. Integrand function
- 2. Variable of integration
- 3. lower bound of domain
- 4. upper bound of domain
Examples:
numint(ln(x)/(x**4+1),x,2,4) = 0.0329272168747
numsolve(eq,symbol)
Only one solutions returned. When solving a single equation, an optional third argument can be the starting point of the Newton method.
Examples:
numsolve(x^4-ln(x)=2,x)
numsolve((x-2)^2=ln(x),x,1.5)
numsolve(ln(x)=y,x/5=y,x,y)
odesolve(expr,symbol,symbol)
Examples:
odesolve(diff(y,x,2)+y=0,y,x)
partfrac(expr,symbol)
Examples:
partfrac(x/(x+1),x) = 1 , -1/(x+1)
pivot(m,r,c)
Examples:
pivot([1,1,2;1,2,1;2,3,3],1,1)
prod(expr,symbol,expr,expr)
- 1. Repeating term.
- 2. Index variable
- 3. Lower bound.
- 4. Upper bound
For example prod(x+2,x,1,3) = 60,
because it is equivalent to (1+2)*(2+2)*(3+2)
Examples:
prod(x+2,x,1,3)=60
random(n)
Examples:
random(10)
rank(m)
Examples:
rank([1,1,2;1,2,1;2,3,3]) = 2
re(expr)
Examples:
re(3+2*i) = 3
roots(expr,symbol)
Examples:
roots(x^2+x-6,x)
round(expr)
rowdim(m)
Examples:
rowdim([1,2,3;2,3,4]) = 2
sec(expr)
sign(expr)
sin(expr)
sinh(expr)
solve(eq,symbol)
Examples:
solve(x^2+x-6=0,x)
solve(x^2-3=y,x=y/2,x,y)
solve((a+b)/a=a/b,a,b)
sub(eq,expr)
Examples:
sub(x=y+1,x^2+1) = y^2 + 2*y +2
sub(x=z+2,y=z/2,x*y) = (z*(z + 2))/2
sum(expr,symbol,expr,expr)
- 1. Repeating term.
- 2. Index variable
- 3. Lower bound.
- 4. Upper bound
For example sum(x^2,x,0,3) = 14,
because it is equivalent to (0^2+1^2+2^2+3^2)
Examples:
sum(x^2,x,0,3) = 14
tan(expr)
tanh(expr)
taylor(expr,symbol,expr,n)
- 1. Function.
- 2. Variable of the function.
- 3. A point.
- 4. Maximum degree
Examples:
taylor(sin(x),x,1,3)
tp(m)
Examples:
tp([3,4;1,2]) = [3,1;4,2]
trigsimp(expr)
Examples:
trigsimp(sin(x)^2+cos(x)^2) = 1
vlen(v)
Examples:
vlen([1,2,3])
vdot(a,b)
Examples:
vdot([1,2,3],[2,3,1])
vcross(a,b)
Examples:
vcross([1,1,0],[0,0,1])
If you have any questions, problems or ideas about the application, feel free to contact the developer.
Filling out the e-mail field is optional.